
Blog > Automation > Dual-Loop Servo Control Explained
Dual-Loop Servo Control Explained
10/5/21 | Chris Williams, Rexel Technical Consultant
Blog > Automation > Dual-Loop Servo Control Explained
10/5/21 | Chris Williams, Rexel Technical Consultant
In this blog, first, we’ll look at single-loop control and its potential issues. Then we’ll learn about dual-loop servo control and the circumstances under which it may be a good solution.
Most servo applications are run in what we call single-loop control. This means that there is a single feedback device, typically mounted on the back of the motor, that provides position and velocity feedback to the drive and motion controller. Because the feedback device is mounted directly on the motor shaft, you can be confident that it is showing the true position and speed on the motor.
This means that there are two feedback devices in the servo control system. The first device will be mounted directly to the motor and will be used to control the velocity of the system. The second device is typically mounted to the final load and will allow for better position control at the final output.
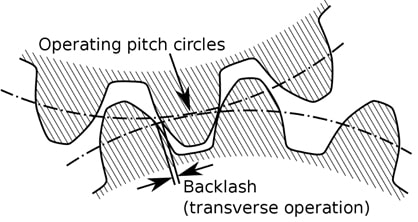
The issue with this single-loop control system comes into play once we add a mechanical load onto the motor. If the final load is also directly coupled to the motor shaft, then we have nothing to worry about. However, once we add couplings, gearbox, screws, and other mechanical in the system, their backlash and compliance will add up, and, in certain high-precision applications, cause control problems. Every mechanical system we add will come with its own ratings for the compliance it adds to the system. No matter how stiff the coupling, it will add torsional wind up (think about twisting a spring), and screws, belts, and gears will almost always have a small amount of backlash in their mechanics. On the load side, if a large force is being applied by the end tooling, then the whole mechanical system can flex and cause the servo system to think it is in a different position than it is. No matter what we do, these issues will exist because of the physical properties of the materials used.

Adding dual-loop servo control can make the system much more complex and expensive, so it is better to look at the mechanical design first to make sure dual-loop servo control is necessary. To start, we must make sure we have a stiff, well-design mechanical structure to build on. No amount of extra feedback can compensate for sloppy mechanics.
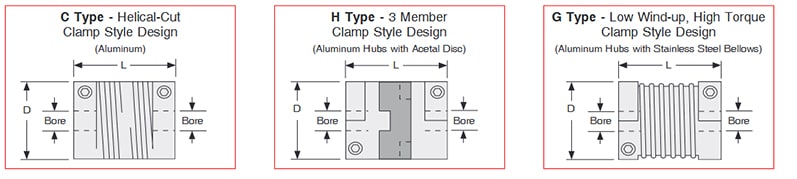
Secondly, we need to look at our mechanical transmissions and eliminate any issues there. This will add cost to the system, but it is typically less than adding a secondary feedback device. Helical cut couplings are lightweight and low cost but have high torsional windup and low maximum torque ratings. An easy upgrade for this would be to go with a three-piece, spider coupling or a steel bellows coupling. Both allow for higher torque ratings and lower wind up.

After the coupling, we need to look at our gearboxes, belts, and screws. With a belt actuator, there is not much we can do other than make sure the belt is properly tensioned, which is why ball screws are typically used in high-precision applications.
Standard rolled ball screws will usually have a backlash rating on the order of 50-200 microns. To eliminate this, we can preload the ball screw, adding a second ball nut with a spring between them to make sure the balls are always pressed against the screw. We can also step up to precision ground screws for better lead accuracy, and thus making sure one turn of the motor really is what we expect.
For gearboxes, low-backlash, high-precision gears can be used to make sure they mesh properly and eliminate most of the backlash in the system. This also usually requires factory testing to make sure the gearbox meets the published specs and that the gears are properly matched for optimal performance.
If we have addressed all these design issues but still require additional precision, then we can look at adding a secondary feedback device for dual-loop servo control.
The first step to using dual-loop servo control is to add a secondary feedback device that is connected directly to the load. This is usually a linear encoder that will be used to control the position loop of the servo system. In this system, the motor’s feedback will still be used to control the velocity loop of the system. This is important because it will be able to reliably control the motor regardless of any mechanical disturbances in the system.
When choosing this linear encoder, it is important to make sure a sufficient resolution is picked. The rule of thumb for this is to have a feedback resolution 10x better than the system requirement. If the system requires +/- 1 um then we would want to get an encoder with at least a 0.1 um resolution.
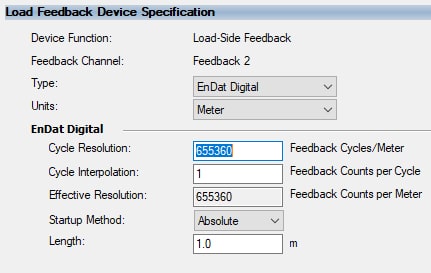
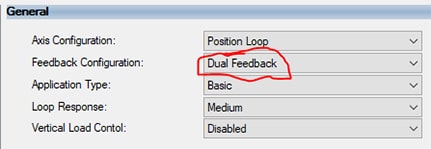
In a servo system that supports dual-loop servo control, the programming configuration is usually simple and only required entering the additional encoder information as shown below and telling the system that it will be in Dual Feedback Mode.
You don’t have to go it alone. Our motion control experts are here to walk you through the options and make recommendations based on your specific needs. We can even design an end-to-end solution. Contact us today!