
Blog > Automation > Motor Encoders Explained
Motor Encoders Explained
2/4/20 | Chris Williams, Rexel Technical Consultant
When it comes to motion control, the feedback device is one of, if not the most important, element of the system. Without a feedback device, the motor will be running in an open loop and not reliably able to position the load, or even move at all. The most common types of feedback devices that you will come across will either be motor encoders or a resolver. While resolvers are very robust devices, they are not very common on today’s servo motors, so we will focus our discussion on encoders.

Simplifying Motor Encoders
In their simplest form, motor encoders are electromechanical devices that turn mechanical motion into an electrical signal. The output signal can either be a series of pulses, an analog (a.k.a. sine-cosine) signal, digital signal, or converted to a communication bus. The signal is sent to a servo drive that will translate that signal into position and velocity values. Today we are going to focus specifically on motor-mounted encoders, so our discussion will not involve encoders with communication buses.
With motor-mounted encoders, the main decision that needs to be made revolves around whether the encoder will be incremental or absolute.
Types of Motor Encoders
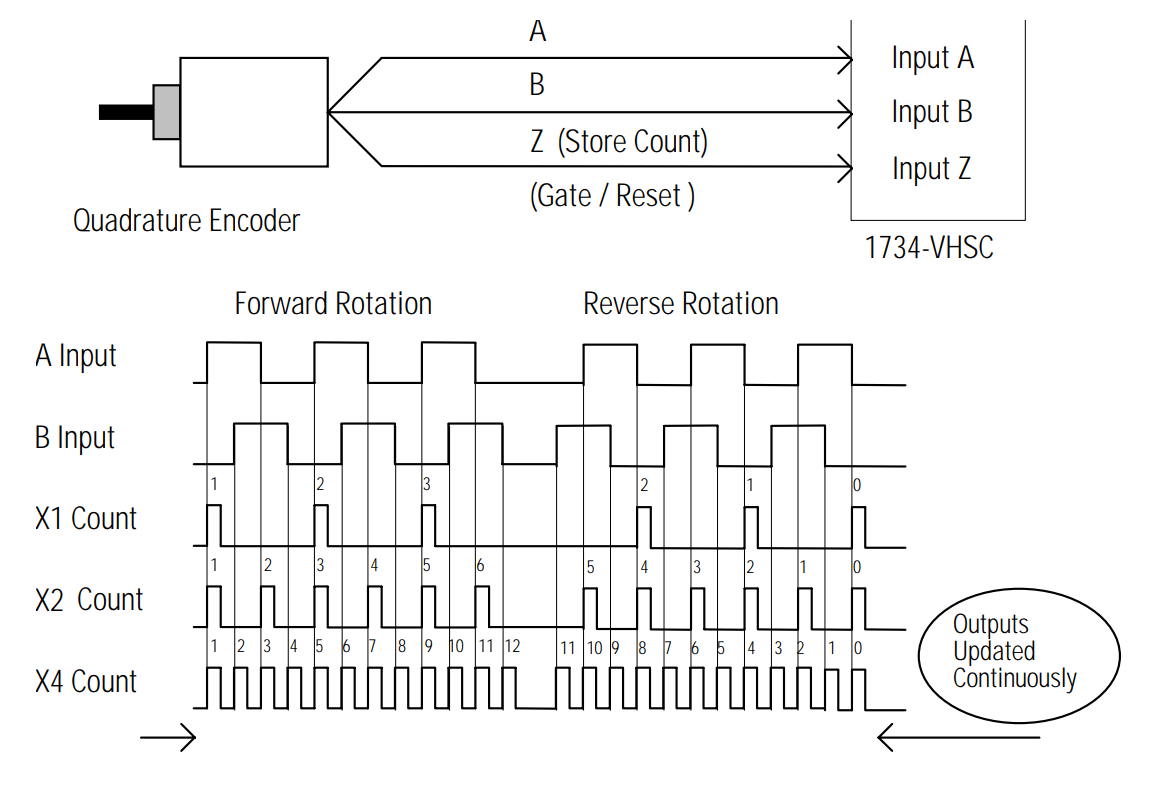
Incremental encoders rely on the drive to interpret the position based on the output pulses that the encoder sends to the drive. The outputs for an incremental encoder are typically two square waves (A and B), which are then used to determine the direction of rotation. This signal is sometimes combined with an index pulse, which occurs once per revolution (Z). Combining the two square waves will then give you a “quadrature” signal.
The other common type of incremental encoder is called sine-cosine (Sin/Cos). The main difference between the two is that sine-cosine encoders send their signal as 1-volt peak-to-peak (1 Vpp) analog sine waves on the A and B channels. Because of the continuous wave signal of the Sin/Cos encoder, they can achieve much higher resolutions.
© Rockwell Automation® Encoder/Counter Modules User Manual
Both types of incremental encoders can use X4 encoding to quadruple the resolution of the feedback device. For Sin/Cos encoders, this is done by counting the number of times the signal crosses 0V for a given period. For the square wave encoders, they count both the rising and falling edges of both square waves for each period.
The main downside to these motor encoders is that the servo system will lose its position information when power is turned off. This means the system needs to find its home again at power-up. At the least, this will lead to longer startup times for machines, but at the worst, homing can be impossible due to tooling designs. To solve this issue, many engineers started to use absolute encoders.

MAINTAINING POSITION
An absolute encoder maintains position information when power is removed from the system. This allows the system to immediately know its position and start working on power-up. An absolute encoder will use a coded wheel that allows each encoder position to read a unique value. Because each position has a unique value, if the motor is turned while power is off, the motor will know its new position when power is restored.
One issue with this setup, if the motor is turned more than one revolution while power is off, the system will no longer reliably know the position of the output mechanisms. To solve this issue, some motors come with multi‐turn encoders that use multiple discs or gearing to allow the motor to turn more than once while the power is off and still retain its position information. Rockwell Automation® servo motors typically come with 12-bit, multi-turn encoders, which means they can be turned 4,096 revolutions with the power off before they lose track of their position. The downside of multi-turn encoders is that they often do not have as high a resolution as single-turn encoders. To solve this issue, Rockwell Automation pairs a single-turn (18-23 bit, 262,144-8,388,608 counts!) with a multi-turn encoder. This system gives very high motor encoder resolutions with the benefits of multi-turn encoders.
DRIVE COMMUNICATION
To communicate back to the drive, absolute encoders will either send the raw encoder pulses or use a communication interface. These interfaces will send the absolute position in sync with a clock signal. To improve on these designs, some motors now come with a DSL encoder that communicates with the servo drive using only two wires. This digital communication allows feedback signals to run in the same cable as the motor power and allows more two-way communication with motor encoders and drives.
Still Have Questions About Motor Encoders?
Our Automation Specialists have the answers to all your motion control questions. From increasing safety to maintaining productivity, our specialists will assess your situation and recommend solutions to meet your needs. Contact us today!