
Blog > Automation > Choosing a Servo Motor Brake
Choosing a Servo Motor Brake
4/6/21 | Chris Williams, Rexel Technical Consultant
Blog > Automation > Choosing a Servo Motor Brake
4/6/21 | Chris Williams, Rexel Technical Consultant
There are a number of types of servo motor brakes and choosing the right one depends on your needs. In this blog, we’ll look at some of those types.
When working with servo motors, we typically discuss the brake that is attached to the back of the motor. This servo motor brake serves the important function of holding a load in place when the drive is disabled or power is lost, most often for vertical applications. Servo motor holding brakes are usually controlled by a relay or transistor in the drive that controls the signal to the brake. When power is applied, the brake will release, allowing the motor to spin freely. When power is dropped, the brake will actuate and hold the load in place. This type of function is important because it allows the brake the hold the load any time power is lost. The brake that comes mounted on the motor is properly sized to be able to handle any reasonable load that is attached to the motor. This means that unless you have an unusually large load for a given motor size, the brake will be able to hold it in place and prevent it from dropping when power is lost.
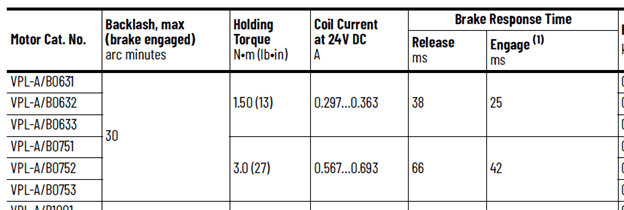
When setting up a system that will require a holding brake, it is important to note the brake engage delay. On Rockwell Automation® motors, this value ranges from 25-120ms. The drive configuration can use this value to compensate for the delay when enabling and disabling the motor to prevent unintended drops.
The important part to remember about this setup is that the brake that is built into the motor is for holding the load only. This brake cannot be used to stop a load in motion.
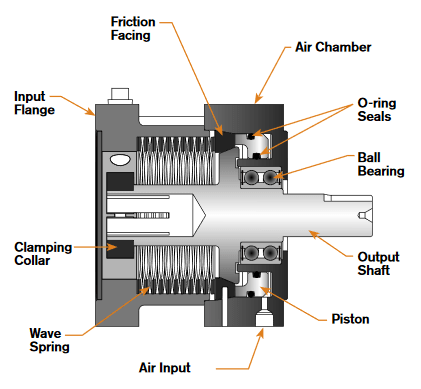
But what happens if you need something more than just a holding brake? Thankfully, when looking at servo moto brakes, there are plenty of options from simple pneumatic brakes to electrically controlled safety brakes.
While many times the holding brake will come as part of the motor package and require little to no work for sizing, dynamic brakes do require a bit of work to be sized. To select a brake for desired performance and life, first gather the following application information:
Once we know all the required information, we can start to size the dynamic servo motor brake. The first item to calculate is the required torque. This is an easy formula:

In the above equation, the units of velocity would be RPMs and time is in seconds.
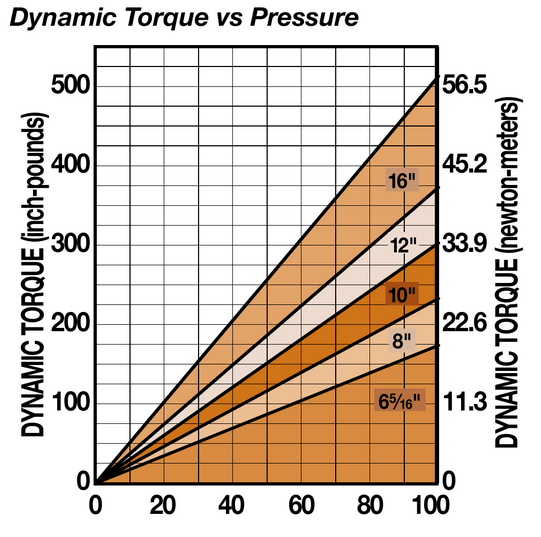
Once we know the required torque, we can use that to select the appropriate brake. The chart below shows the torque ratings for a pneumatic caliper style brake from Tolomatic™.
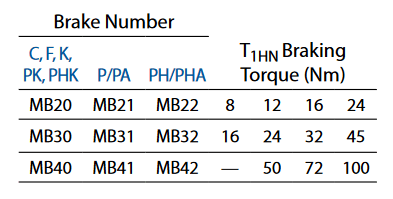
For STOBER’s electric, spring-powered ServoStop brake, we choose from a chart that lists these servo motor brakes based on their torque rating.
The next step is determining the annual cycles of the brake. This value will then be used to calculate the expected life of the brake. When using the brake as part of a regular stopping operation, we can look at how often the brake is used to stop a load and extrapolate that out to a full year. For example, if the brake is used to stop a load every 60 seconds, and the process is running 16 hours per day, 5 days per week, that would mean roughly 250,000 cycles per year. Using that information, we can look at the B10 rating for the brake. The B10 rating is the point at which 10% of a sample lot has failed (measured in cycles). The B10 values are determined according to the EN ISO 19973 standard. If we look at a brake with a B10 of 1,000,000 when we know the brake should have an expected life of at least four years.
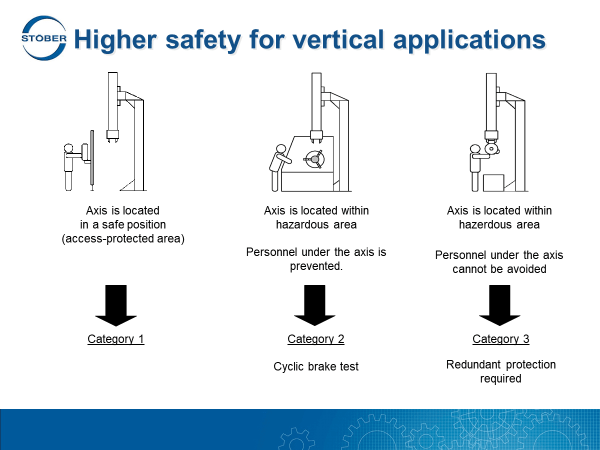
The start of a safety brake selection is like a standard dynamic brake, but like any safety-rated product, safety brakes take the regular sizing and add another layer of complexity on top of it. In addition to determining the required size of this servo motor brake, we need to determine the hazards involved and the required safety ratings. This topic is outside the scope of this blog, but as a basic example see the image below from STOBER. Depending on the hazards, the brake will need additional safety features such as redundancy and actuation verification.
It is also important to calculate the MTTFd (Mean Time to Dangerous Failure) and B10d. Note: B10d can be referenced as B10 x 2.
After the proper safety brake has been selected, the stopping and actuation times will be needed to determine the minimum safe distance between the safeguarding device and the hazard.
Like any safety application, this is just scratching the surface and we will be going more in-depth on this topic in a future post.
You don’t have to go it alone. Our motion control experts are here to walk you through the process and make servo motor brake recommendations based on your specific needs. We can even design an end-to-end solution. Contact us today!
