
Blog > Automation > How to Tune a Servo Motor
How to Tune a Servo Motor
9/12/19 | Chris Williams, Rexel Technical Consultant
Do you need to tune a servo motor? This once frequent, time-consuming task has been the bane of controls engineers across the automation industry. Thankfully, tuning a servo motor has become less common thanks to tools such as Load Observer and other tuningless features. However, on servo systems where these tools are not present, manual tuning is still the go-to method for attaining optimal performance. So, let’s walk through tuning a servo motor.
Trial and Error
Because servo tuning is not an exact science, the best tool an engineer can have is their experience in the art of tuning a system. There is no one “right” set of tuning parameters for any given application. With close observation of the system as you adjust parameters through a trial-and-error approach, an initially rough system can be made to run much more efficiently.

DESIGNED FOR TUNING
Before a controls engineer can begin to tune a servo system, the mechanical engineers need to design a system that can be handled and tuned in the first place. If the servo system has an inertia ratio that is too large (>10:1), no amount of skill and time will be able to get the system to run properly. But if the mechanics are designed well then, the controls engineer can start to tune a servo motor.
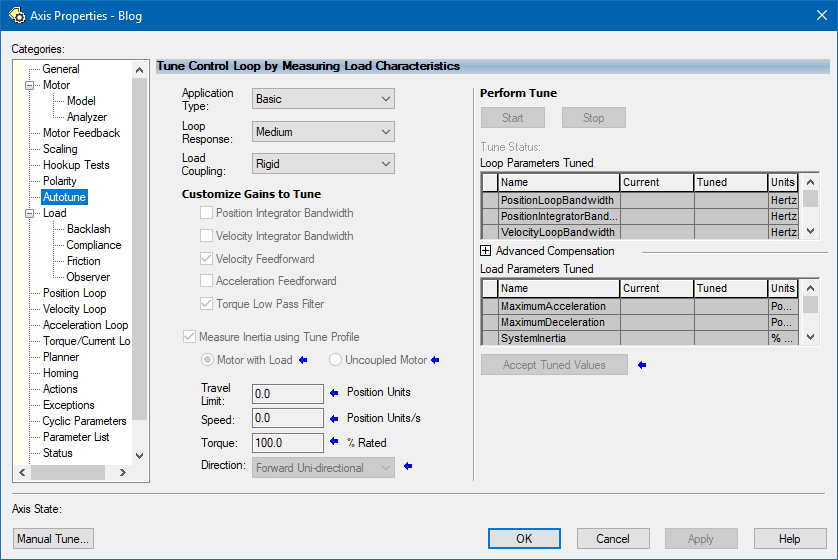
AUTO-TUNE
Some servo systems offer an “auto-tune” option in their software which can help get the engineer to a much closer starting point and shorten the tuning process. The auto-tuning process will test the motor and drive combination in a short test move and set and identify more parameters than can be handled in a manual process. However, in certain systems, especially those that are highly dynamic, the auto-tuning process will not deliver the best results. And if there is too much compliance in the system, it will make the entire process more difficult.
MANUAL ADJUSTMENT TERMS
Whether or not you perform an auto-tune, the process to tune a servo motor will involve manually changing various gains in the servo loop (typically the Loop and Integrator Bandwidths). This is an iterative, trial-and-error process. So, you need to make small adjustments until the motion is smooth, there is little or no audible noise in the system, there is little or no position error after the move, and the velocity error and overshoot is minimized during motion.
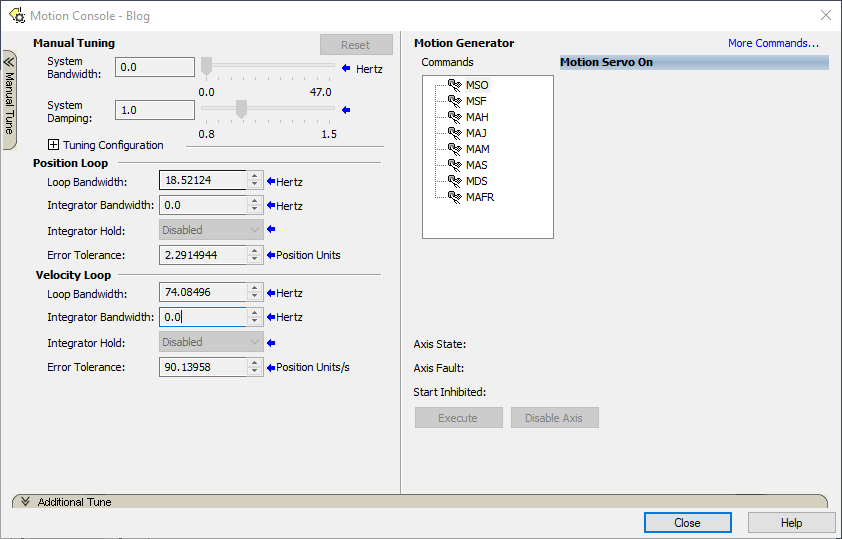
The main gains that are adjusted in a tuning system will be the Proportional (Loop Bandwidth), Integral (Integrator Bandwidth), and Derivative Gain (System Damping).
The Proportional Gain is related to the stiffness of a system and is typically adjusted first. This gain determines how much voltage is applied to decrease the position/velocity error in the system. The amount of force applied to the system is proportional to the error in the system.
The Integral Gain provides a force at the end of the move to get the axis to a point where there is zero error in both the velocity and position. The term integral comes from the fact that the system will accumulate (integrate) the error, and the greater cumulative error, the larger the integral and force become. Both the Proportional Gain and Integral Gain for the Position and Velocity Loops can be easily adjusted using just the System Bandwidth slider in the Rockwell software.
The Derivative Gain acts as a damper on the system to reduce overshoot and oscillations. The Derivative Gain looks at the rate of change of the system error and applied a force relative to that.
FIND THE BALANCE TO TUNE A SERVO MOTOR
There are different schools of thought on how to best go about tuning a system, but the most common involves increasing the Proportional Gain (or System Bandwidth) until the system becomes overtuned. The system will become overtuned when it overshoots the target by a large amount or begins to oscillate and never reaches a point of zero/minimal error. You can then slightly back off the Proportional Gain and increase the damping until you find a good balance between fast response and low overshoot. The gains are then slightly increased in achieving optimal performance without over tuning the system. The Integral Gain can then be used to remove the last of the error but should only be used sparingly to keep the system stable.
Remember, tuning is not an exact science, and the best tool an engineer can have is their experience in the art of tuning a system.
WE CAN HELP YOU GET IN TUNE
Whether it’s your first time tuning a system, or you just need some advice, we can help you tune a servo motor. We have Automation Specialists on hand who are motion control experts. They’re ready to help your business (and motors) run smoothly. Contact us today!