
Blog > Automation > Drive Modernization Part V: PowerFlex 700 to PowerFlex 750
Drive Modernization Part V: PowerFlex 700 to PowerFlex 750
1/20/21 | Scott Savage, Rexel Technical Consultant
Blog > Automation > Drive Modernization Part V: PowerFlex 700 to PowerFlex 750
1/20/21 | Scott Savage, Rexel Technical Consultant
This blog will cover Allen-Bradley® architect drives modernization from the PowerFlex® 750 series drives that will supersede the PowerFlex 700 series platform. This is the fifth blog in a series of AC drive modernization literature to help assist you to migrate your drives forward. Other titles in this series include:

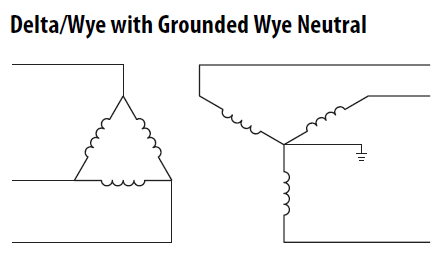
There are many ways electrical distribution can be configured to achieve the voltage needed to be delivered. Since we are setting up a new drive, let’s look at the three major methods of transformer secondary configuration. This article will not cover TN-S five-wire systems commonly used in Europe or any center-tapped delta systems. For information on any of these systems please refer to the DRIVES-IN001-EN-P wiring and grounding document from the Rockwell Automation® website.
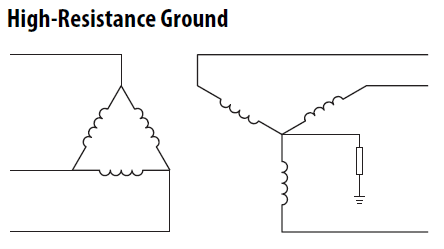
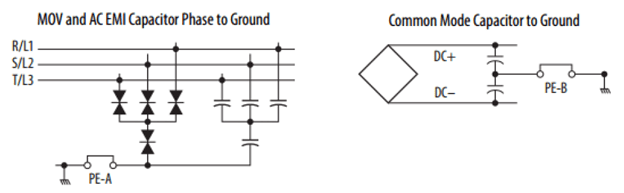
What are the jumpers for? Each of the two jumpers provides different functions to meet UL requirements. The first jumper is used to assist with surge mitigation and banks of MOVs on each phase of the drive. The second jumper is for addressing high-frequency noise on the output of the drive. This jumper attenuates noise that could interfere with surrounding devices with lower impedance levels (e.g., metal detectors, transmitters, and analog devices) in areas where the motor could be in close proximity to these devices. Both jumpers should remain in place with a solidly grounded distribution system. Please examine the PowerFlex 700 drive and then verify the secondary of the supply transformer to make sure you are providing the correct solution.
Both PE-A (MOV) and PE-B (common mode output filter) ARE INSTALLED
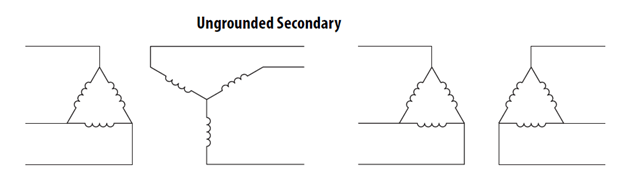
Both PE-A (MOV) and PE-B (common mode output filter) ARE REMOVED
Both PE-A (MOV) and PE-B (common mode output filter) ARE REMOVED
The motor needs a solid bond from the drive to the motor, the ground wire or multiple ground wires need to go directly from one of the two green ground screws on the drive chassis to the conduit box on the motor. Do not place the ground from the motor to a common ground bus in the drive cabinet or the common ground bus in an MCC, this injects noise which seeks noise generated from the drive output to other areas in your facility. This is a physical requirement for a successful drive installation.
In addition, a varied frequency drive (VFD) shielded cable should be on the output side of the drive to cancel noise, which could be contained to the output wires or airborne in the output cable. Please avoid THHN if possible; thermoset insulation “cold sets” and is also susceptible to moisture. XHHN wire is preferred and shielding is extremely important to the successful commissioning of the drive. Inspect all wires down at the motor end of the drive for corona damage (pitting) and replace, if needed. To ensure a good bond at the motor, remove all paint on the motor junction box, all currents need to cancel to zero, including noise, and drives should be considered “noise generators.”
Good practices lead to fewer problems later when the drive is operating. Please do not assume that because the drive operated properly before it will continue to operate in the same manner. Once again, the grounding path is a physical practice and must be followed specifically upon installation.
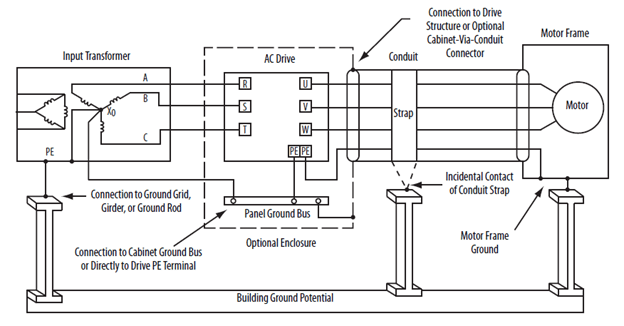
Please note the PE connections from the motor frame to drive PE screw it is grounded at both ends. This holds true for all distribution systems unlike the jumpers discussed above.
It is extremely important to have a backup of the parameters in the existing drive prior to failure. Listed below are the different methods the parameters stored in the drive can be saved for future use on a PowerFlex 700 drive to be used when programming a PowerFlex 753 or PowerFlex 755 drive. Knowledge of how these parameters operate is also key to a successful modernization. Ways to store the parameters are as follows:
Please keep in mind, the PowerFlex 750 drive is a different platform than the PowerFlex 700 drive and must manually be programmed into the drive. A good reference helps to know what must be changed in the PowerFlex 750 drive that was in the PowerFlex 700 drive.
For the purpose of this blog, we will concentrate on the PowerFlex 753 drive, which is a general-purpose drive. The PowerFlex 755 drive is designed with an embedded Ethernet/IP port to be used with Rockwell Automation ControlLogix® processors, although it can be used as a general-purpose drive. Please keep in mind, the PowerFlex 755 drive has one universal AC/DC input and one relay output embedded on the bottom of the main control board. If more inputs and outputs are needed, an I/O card can be added to the additional ports on the drive.
The PowerFlex 55 drive has five expansion slots, two of which are behind the HMI (keypad). The I/O expansion card comes in two voltages, 24 V DC or 120 V AC inputs. Analog signals in the PowerFlex 755 drive need an expansion card. The same I/O cards can be used in the PowerFlex 753 drive if an additional I/O mix is needed. The PowerFlex 753 drive has three 24 V DC inputs, one relay output, and one analog input (0-10 V DC or 0-20 mA) and the minimum analog value must be adjusted with a parameter to achieve a 4-20 mA span for signal loss recognition. One analog output is also provided with the same ranges as the analog input.
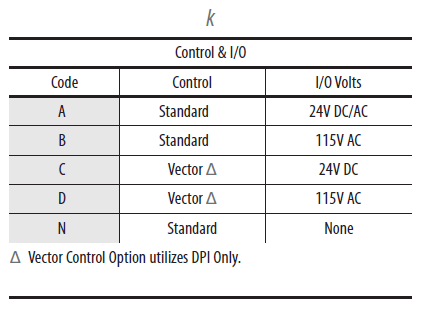
Let’s examine two and three wire control methods comparing PowerFlex 700 drive vs. PowerFlex 753 drive. We will use the vector control card as an example. To determine which main control board you have, look at the catalog string on the drive label, it will declare which control board you have.

Position “k” will tell you the MCB cassette type, e.g., this is a 24 V DC I/O vector card type “C,” the other voltage for this I/O type is “D” 120 V AC. The majority of main control boards were vector style, if you have an “A” or “B” in position “k,” please refer to your installation manual for the PowerFlex 700 drive. The wiring is slightly different for the standard cassette vs. the vector cassette.
Once we know the type of control cassette we have, now it’s time to explore which wiring scheme the PowerFlex 700 drive has. Please keep in mind, this is for hard-wired applications using the cassette terminal block to start and stop the drive. The PowerFlex 700 drive has predetermined functions on the terminal block. This will be the example shown below, keep in mind any of the PowerFlex 700 drive terminals can be reprogrammed at commissioning and may not be the same as discussed in this article.
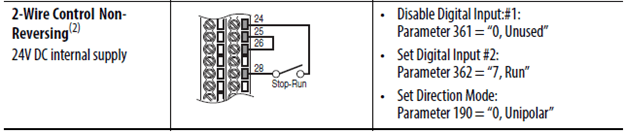
Two-Wire Control Wiring Model Internal Power from Drive PowerFlex 700 24 V DC Power I/O
A two-wire control is shown below for the maintained “Run” command on the designated PowerFlex 700 drive terminal. This example is for 24 V DC provided by the drive.
Two-Wire Reversing Control Wiring Model External Power PowerFlex 700 Drive With 120 V AC I/0

Three-Wire Control Wiring Model Internal Power PowerFlex 700 Drive 24 V DC I/O

Three-Wire Control Wiring Model External Power PowerFlex Drive 700 120 V AC I/O
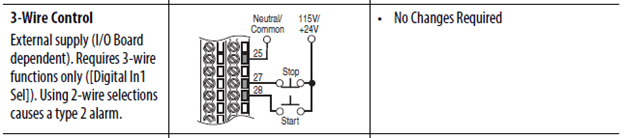
Please note, there is no internal supply for the 120 V AC versions of any of the main control boards. The 120 V AC is supplied outside the drive.
With a three-wire control is a momentary start signal and the drive internally seals in the command until the stop command on the stop terminal opens up. This wiring scheme is to stop the drive on power outages. The drive needs to be restarted when the machine is safe to start back up. A two-wire scheme is used primarily on unattended equipment such as remote pumps and fans, where the drive needs to restart on power up this is a maintained run signal to the drive.
The PowerFlex 700 drive factory default for I/O is three-wire control, if two-wire control is being used, you should see parameter 361 is “not used” and parameter 362 is programmed “run” (nomenclature for 2-wire control).
Let’s see what we have for information at this point:
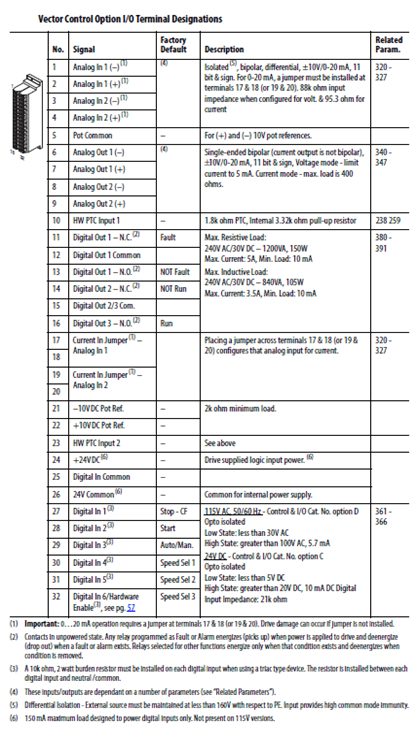
Now, let’s take this information and assign the terminals on the PowerFlex 753 drive. Please keep in mind, the terminals on the PowerFlex 750 series have no assigned functions from the factory like the PowerFlex 700 drive does. Every terminal point on the PowerFlex 753 drive needs to be programmed for the drive to operate.
Important: The PowerFlex 750 series is a modular drive, each location of I/O will have an assigned port and will be determined by the location of the I/O module. These ports are located on a backplane and will be installed in the field when the drive is commissioned. Place these I/O modules in a port in the drive, keep in mind port 6 should be reserved for an ethernet module, the frame is modified to allow the cable to pass through on the bottom of the ethernet module.
If you choose to use 120 V AC inputs, you must use an I/O expansion module in port 4 or port 5. The drive main control board (port 0) is 24 V DC only.
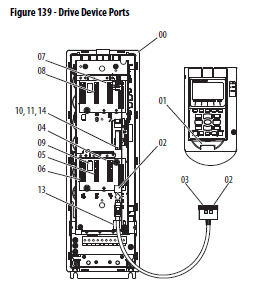
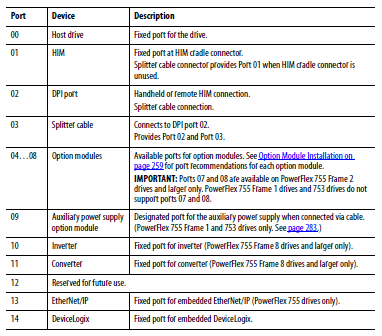
It is important to note the PowerFlex 753 drive has three expansion ports (4, 5, and 6), and the PowerFlex 755 drive has five expansion ports (4, 5,6,7,8) for I/O modules, encoder modules, safety modules, and auxiliary power supply modules (ports 7 or 8 in PowerFlex 755 drive). Keep in mind, if you have an auxiliary power module, you must have a PowerFlex 755 drive and place the auxiliary power supply in ports behind the HMI in ports 7 or 8 and run the cable in the kit to the main control board.
Note on DPI 2 and 3 ports – HMI port 2 and 3: port 2 is the NEMA12 (20-HMI-C6S) version of HMI and port 3 is the NEMA1 version of bezel kit and HMI (20-HMI-B1 and 20-HMI-A6) with eight-pin mini DIN access port on the bottom of the bezel. Most motor control centers (MCCs) use port 3 with NEMA1 gasketed configuration. Port 2 can also be used to plug in a 1203-USB serial programming cable to use the software.
Let’s look at the scenario with PowerFlex 753 drive with Port 0 on board I/O without any expansion modules. All the I/O will be wired to the inputs on the drive, so let’s get the drive to “run” in two-wire control. We will use the examples from the installation guide from the Rockwell Automation website. Download this as your example to wire the drive.
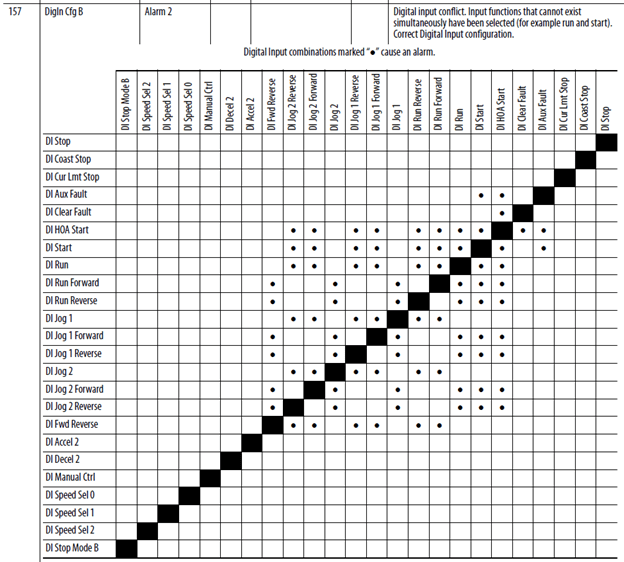
Selected terminal block examples are shown below for the PowerFlex 750 (PowerFlex 753 and PowerFlex 755) series drives. Please keep in mind, you can stop and start the drive anytime with the HMI green and red buttons. Please test this prior to testing the hardwired terminals. Remember, there is no speed reference to tell the drive how fast to go, so the display will show “at speed 0 Hz.” It is a great test prior to testing the terminal strip run or start closure. Once again, it is important not to mix two-wire and three-wire control functions on the terminal because it will give you a “DiIn Cfg B” level 2 alarm. This must be fixed before the drive will start (three-wire) or run (two-wire). The combinations are listed below for a successful I/O configuration.
This reference can be found in the PowerFlex 750 drive programming manual on the Rockwell Automation website. This should be downloaded as a full reference for programming the drive along with the installation manual for wiring the drive.
This blog is to help expedite a drive commissioning, it is not intended to replace any procedures or information that may be offered in literature from Rockwell Automation. The material shown in this blog is from the Rockwell Automation literature to condense the amount of information.
Two-Wire Control Wiring Model Internal Power from Drive PowerFlex 753 24 V DC Power I/O
A two-wire control requires a maintained switch or relay to keep the drive running, please have your documented wire numbers from the PowerFlex 700 drive. Remember, the PowerFlex 700 drive should be a 24 V DC control cassette to avoid damage to the PowerFlex 753 drive main control board (port 0). To “run” close connection between +24 V terminal and Di1. The drive HMI should display “at speed” 0 Hz. This is because we have no speed reference yet, it is not programmed. To stop open the circuit, the drive should show “stop asserted.” This must function prior to continuing the drive commissioning, please check the top of the HMI display for verification then you will proceed to adding a speed reference.
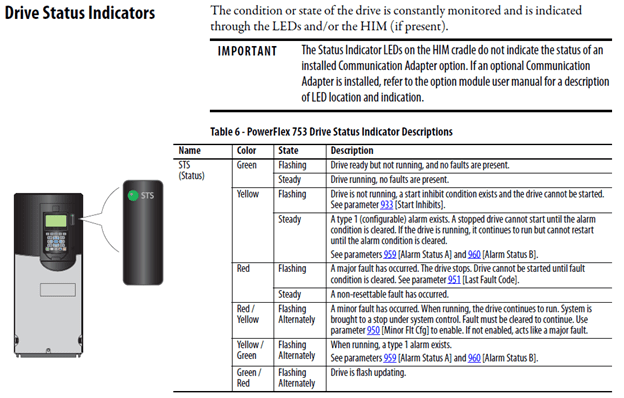
Please apply the same principles for “run forward” and “run reverse” for reversing applications in two-wire control. The status lights on the front of the drive are important. Yellow indicates the drive is being prohibited to run. The solid status light being green means the drive is running. Flashing green means there are no alarms or faults (fault means the drive has an issue that needs to be addressed) and the drive is ready to start.
“Run” is uni-direction, “run forward” (Di1) and “run reverse” (Di2) replace the “run” on Di1 to “run forward” for bi-directional operation. Note, the jumper from 24 V DC to DiC (common for the terminal strip) must be in place when using internal 24 V DC from the drive itself. The 24 V DC also will come from the drive’s 24 V DC (+24 V DC terminal) power supply instead of an external power supply. Please use the two-wire reversing external power 24 V DC example below with the jumper for the common in place instead of the common on the external power supply example.
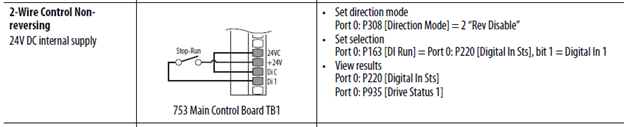
Two-Wire Reversing Control Wiring Model External Power PowerFlex 750 Drive with 24 V DC I/0

Like the example with uni-direction, we are using two-wire control, this shows an external 24 V DC supply to the MCB. To use an internal drive 24 V DC like shown above, the drive would have the 24VC to DiC jumper in place and 24V would come off the terminal on the drive to supply the signal to the “run forward” and “run reverse” programmed terminals. If you wish to use Di0 it is on the bottom of the MCB and a little less accessible than Di1 or Di2 on the front.
There are combinations listed below of green, yellow, and red status lights. Please use these as indicators for different conditions, some may allow the drive to run, but eventually should be addressed. Further detail is in the PowerFlex 750 drive programming manual in the troubleshooting section for solutions to other drive status solutions. Please use these lights to determine why you may not be active on the drive output when you issue a “run,” “run forward,” or “run reverse” command during testing.
Three-Wire Control Wiring Model Internal Power PowerFlex 753 Drive 24 V DC I/O
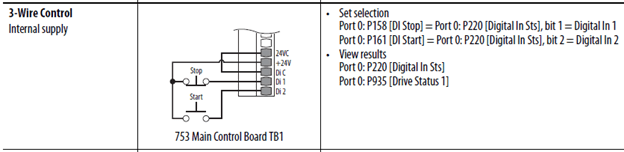
A three-wire control is shown above. The drive will seal in (continue to keep running) the drive on a momentary start command. Notice the switch symbols are different than two-wire control, indicating they are spring-loaded and momentary. The stop button needs to briefly be opened to stop the drive. The drive will not restart until the start button is depressed again, this includes power outages. This scheme is used a lot in manufacturing centers where the machinery will stop if power is interrupted and is safe manually on restart to protect personnel. Unlike an unattended remote pump system or ventilation system, which usually requires an automatic restart.
NOTE: Three-wire forward/reverse is a parameter that can be toggled instead of two separate inputs like two-wire control. Parameter 162 will operate in the forward direction when a value of “0” and reverse direction it operates when the parameter is a value of “1.”
Jog commands also have two-wire and three-wire parameters:
NOTE: Jog commands must be in coordination with the two-wire run and three-wire start/stop configuration shown above. Failure to do so will give you the “DiIn Cfg B” alarm and will not start. To run in both directions Parameter 308 cannot be programmed for “disable reverse.”
Three-Wire Control Wiring Model External Power PowerFlex 753 Drive 24 V DC I/O
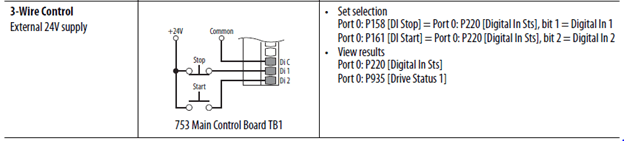
Like other examples shown above, the jumper is removed on 24 V DC and the DiC.
The common is used to the external 24 V DC power supply. The drive will not start if the common is not wired from the external power supply.
Three-Wire Control Wiring Model External Power PowerFlex 750 Drive 120 V AC I/O
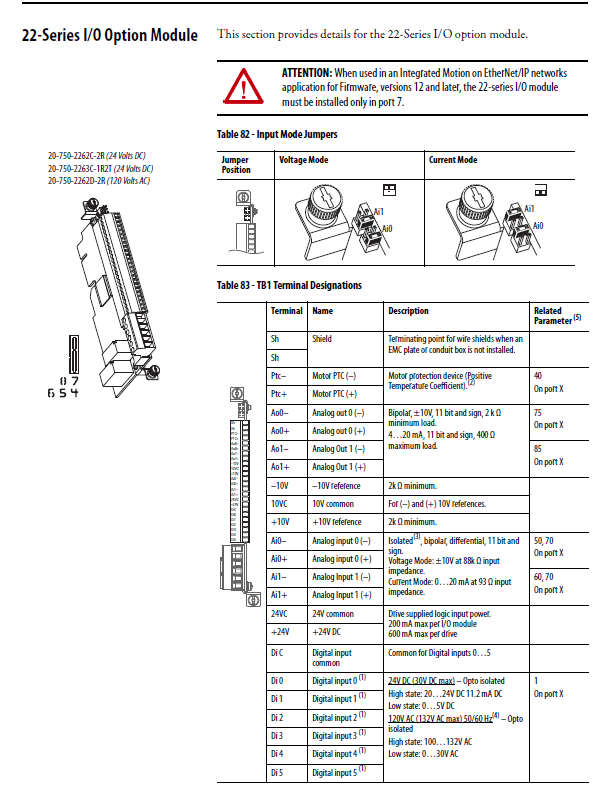
We will now discuss the example of the expansion module. Using 120 V AC, you must use the expansion module. This example uses the 20-750-2262D-2R a 120 V AC I/O card that will plug into ports 4, 5, and 6 on the PowerFlex 753 drive or ports 4, 5, 6, 7, and 8 on a PowerFlex 755 drive. Please keep in mind, if you wish to add an ethernet module later, in the PowerFlex 753 drive, it needs to go in port 6 for cable entry, so try to leave this port unused if possible.
Three-Wire Control Wiring Model External Power PowerFlex 750 Series with 120 V AC I/0
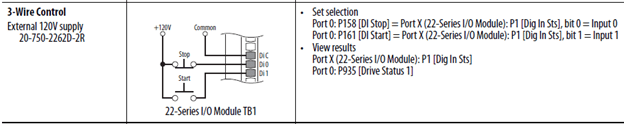
NOTE: The neutral wire for the 120 V AC will be placed on the DiC.
Toggling parameter 162 will reverse direction. Parameter 308 can’t be programmed for “disable reverse.”
Below is a representation of two-wire control using 24 V DC. We will use this model except with 120 V AC, the “run” (one direction) input Di1 will have a maintained switch sourced from 120 V AC external where 24V is shown, then the other side will be wired to the assigned input. The neutral will go to the DiC common connection. “Run forward” and “run reverse” inputs for two-wire reversing can be programmed on Di1 and Di2 on the expansion card. Please keep in mind, you can program any input for these functions. Please use the illustrations below for reference and only to grasp the concept. Like the examples above, these must be maintained switches for two-wire control; the drive will stop when the switch opens.
Non-reversing applications will not use the “run reverse” on Di2, for forward applications only use either just “run forward” or “run” on input Di1.
Concept Only Voltage Should Be 120 V AC with Expansion Module 20-750-2262D-2R

Please keep in mind, there are many expansion modules and the examples used is the most common 120 V AC expansion module. This is an example is the main control board port 0. Please refer to the PowerFlex drive selection guide on Rockwell Automation’s website for information on these modules.
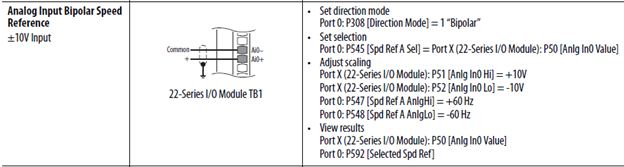
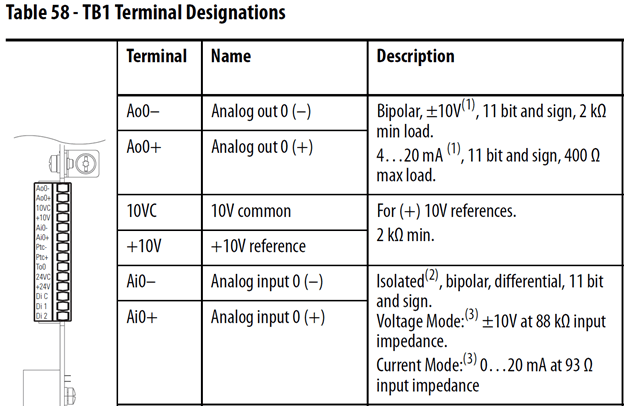
Just a quick explanation on bipolar control. A -10 V DC would command full speed in reverse, and +10 V DC would be full speed forward. And 0 V DC is 0 speed command. This is accomplished by an analog input on the drive. Parameter 308 must be programmed for bipolar control. This is an example of TB1 the terminal on the main control board (port 0). If you wish to use the analog input on the expansion module, you can assign the port number and choose analog Ai0 (parameter 50) or Ai1 (parameter 60).
Navigation Between Ports Using Human Interface Module
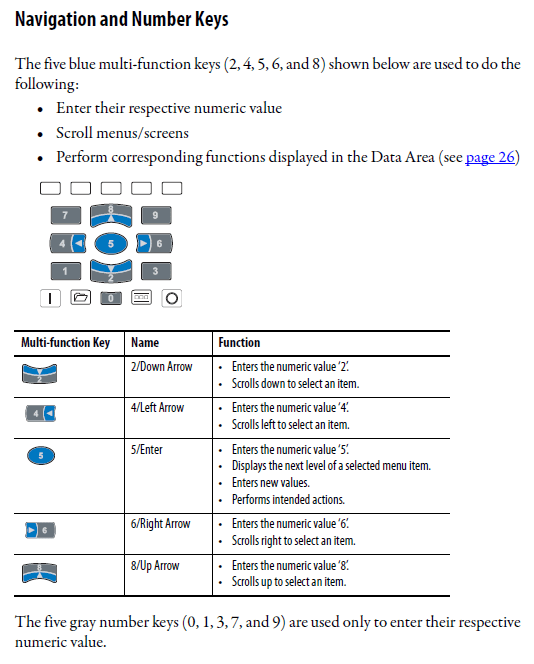
The image button above is your navigation key to access all the programming resources in the drive. You can use the left and right blue keys to move the “ports” tab. Scroll up or down with the blue keys till you highlight the correct port with the I/O module in it, then press enter (soft key). The I/O has parameters that you now can access on the module.
NOTE: The top five keys on the HMI (keypad) are called soft keys and will change function depending on what screen you are presently located on. Please watch for the display to indicate the function of the soft key. For example, “enter” to finalize your edit in the parameter and make it permanent and “esc” to back out of the parameter and not make a change.
Now that we have wired the drive to the unassigned inputs on the drive, we must understand the concept of the terminal configuration so the signal will have a function inside the drive. The PowerFlex 750 series drive is not like the previous drives Rockwell Automation has manufactured. The concept now is modular, and it is important to know which port you are in with either the HMI or with the Connected Components Workbench software.
This example shows the concept if an expansion card is added to the backplane of the drive. Remove the cover on the drive and look in the back of it; you will see numbers to the ports and their sockets to place the expansion module in. The numbers are clearly stamped on the metal frame of the backplane. Plug the module in and screw down the fasteners on the module.
This example shows the module in port 4. Now it is important for the HMI to be in the right place to assign the DI start and DI stop parameters in Port 0. Place the wires from the PowerFlex 700 drive for start and stop and place them on the digital inputs you wish to use on the new PowerFlex 753 drive. If you are using the HMI to program the drive you are port 0, a picture of the drive should be on the screen if you are in the right port. If you are not in the right port, use the file button and scroll with the left and right blue colored keys to the “ports” tab then up down blue colored keys. Highlight port 0, and then hit the enter key (soft key on right).
We need to be in the right area of the drive to access the correct parameters for that port. Keep in mind, if you can’t find the parameter, you are in the wrong port. It is important to know where you are and where you need to go, this is a completely different approach than the PowerFlex 700 drive, but much more versatile.
When you see the image in the HMI, that is the port that is hosting. So when you scroll down through the parameters, you are viewing the host parameters. This becomes a physical type of programming strategy, the best way to describe how to comprehend navigation is this way:
IMPORTANT
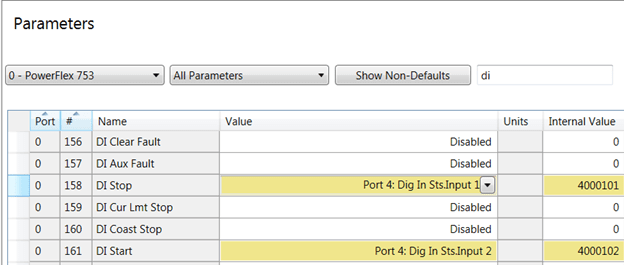
Let’s view assigning the three-wire scheme for the PowerFlex 753 drive. We have wired to the start and stop wires to Di1 for stop and Di2 for start. The host is port 0 because we are doing digital inputs (it is shown on the top left). We now are viewing parameters in the main control board port 0. Notice on parameter 158 there is an arrow to drill down into port 4 where the expansion module resides. The Dig In Sts bit 1 is the terminal 1 on the module. The HMI in port 4 will show parameter 1 for the status bits for the terminal with a similar arrow. You will need to drill in and choose the individual bit and press enter.
HINT: After you press the enter key, use the left and right blue navigation arrows on the keypad to scroll across to verify the correct sts bit which is the terminal number on the expansion module.
Now assign the start parameter in Port 0 to sts bit 1. If start and stop are not assigned properly, you will get a “DiIn Cfg B” level 2 alarm. The drive will not start until this alarm is resolved with the correct configuration.
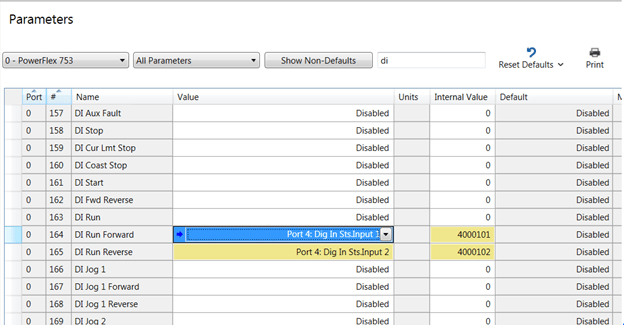
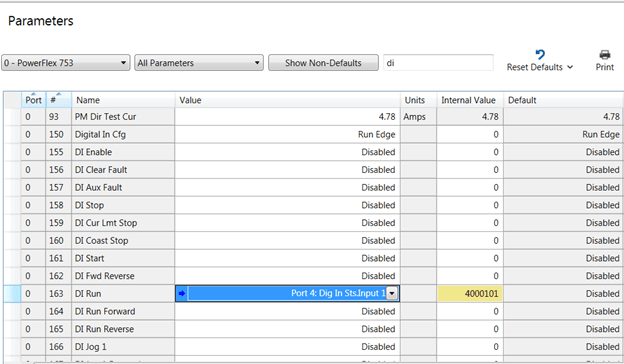
Let’s view assigning the two-wire scheme for the PowerFlex 753 drive. We have wired to the start and stop wires to Di1 for “run forward” and Di2 for “run reverse.” The host is port 0 because we are doing digital inputs, it is shown on the top left. We now are viewing parameters in the main control board port 0. Notice on parameter 164, there is an arrow to drill down into port 4 where the expansion module resides. The Dig In Sts bit 1 is the terminal 1 on the module on port 4. The HMI in port 4 will show parameter 1 for the status bits for the terminal with a similar arrow. You will need to drill in and choose the individual bit and press enter. Dig In Sts bit 1 would be programmed for “run.” This will give you one direction instead of forward and reverse. This example is shown below.
Now test and start the drive in either two-wire and three-wire control by sending a signal to the terminal to either “start” or “run.” The drive HMI should display “at speed” this means the drive has started and the sts light will be solid green. We have not assigned a speed reference yet, although, if you wish to change speeds, you can operate from the HMI on port 1 (it is the default) shown below once you get the drive to start. Type in a numeric value of the speed on the process screen in Hz value to change speed after the drive is started. The process screen displays amps, bus voltage, etc., vs. the programming screen that shows the drive main control board icon and is not the correct screen. The speed reference by default is port 1 the HMI.
At this point, the start or run command is working on the drive; you just need to assign a speed reference since the odds are likely you are not using the HMI. Let’s choose an analog signal, which can be done from an expansion module or from the main control board. This is a parameter in port 0 because it is an input like the digital inputs you programmed prior to reaching this part of the blog. The parameter number is 545 for “spd ref A sel.” This parameter is the primary speed reference. There is a speed reference B and must be invoked if a second speed reference needs to be programmed. This holds true for other functions such as starts, jogs, etc. There are second values that can be used and will not be part of the focus of this literature.
Analog signals come in different flavors. Voltage and current can be scaled to achieve maximum and minimum speed, and as you change the magnitude of the scale you change the commanded speed. The drive will use the slope of the acceleration1 (parameter 535) and deceleration1 (parameter537). Please be aware the numeric default is ten seconds for both parameters. You can go to these parameters in port 0 and change these to the desired times you need for your application.
Let’s change the value from port 1 to an analog channel on the main control board with parameter 545 in port 0. Navigate to port 0 on HMI or use the Connected Components Workbench software (which is a free download) to change parameter 545.
The default from the factory on all analog channels is 0-10 V DC; these are achieved by jumpers on the main control board or the expansion module you have installed, the factory does not install expansion modules unless you buy a packaged drive in an enclosure. This focus is on standard drives, which is just the drive itself, not a built-up custom drive. The modules must be ordered separately.
Let’s start with the jumpers on port 0. We will change these jumpers to a 0-20 mA analog signal type instead of 0-10 V DC. We will change the scaling to do 4-20 mA to provide an indication we have an analog signal loss (so below 4 mA the drive senses the signal is lost). We need to move the jumpers (it can’t be programmed in the drive for analog inputs), so let’s take a look at the screen capture below.
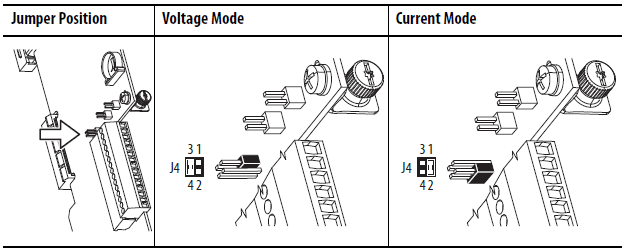
Move the jumpers into the current mode position for 0-20mA. Wire to channel Ai0 on the main control board shown below. Please keep in mind, polarity matters, please connect them correctly for proper installation.
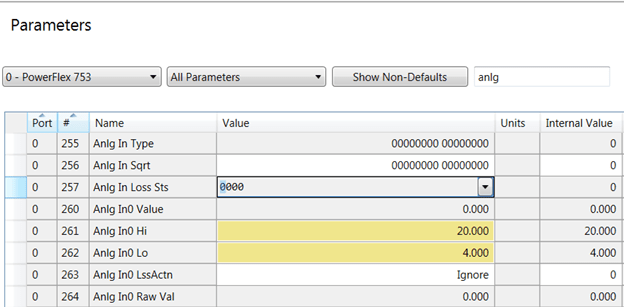
Next, let’s view the parameters for the Ai0 channel on port 0 shown below. First, let’s change the scaling on the Ai0 low to 4 mA. Navigate with the HMI to Parameter 262 and change to value from “0” to “4.” Now the scaling is correct on the analog channel. When you move the jumper on port 0 now in parameter 255, the bit on the far right should be a “1.” This is not shown in the parameter set below because the software is not connected to the drive and is status only.
Once the drive is powered on, parameter 260 should show the analog value from the device supplying the signal; you will not need to break the wire and use a meter. If you wish to change the action for a signal loss on 263 instead of “ignore,” you can set for a variety of actions (e.g., one is “alarm” this will not stop the drive). Other actions can be programmed to stop the drive and fault the drive to ensure you are at the proper speed.
Please keep in mind, the chart below shows the host on the top left you accomplished this whole procedure with the drive parameters all in port 0.
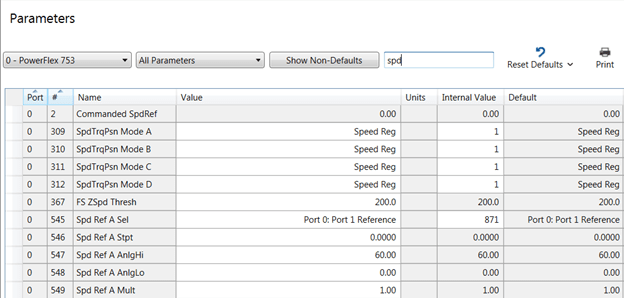
Finally, we are ready to point the speed reference to Ai0. This parameter is 545 “spd Ref A.” Spd ref A resides in port 0 as well as Ai0. Once again, a reminder to know what port you are presently in and where you need to go for the physical channel.
Navigate using the HMI or the Connected Components Workbench software to parameter 545 and choose Ai0 shown below.
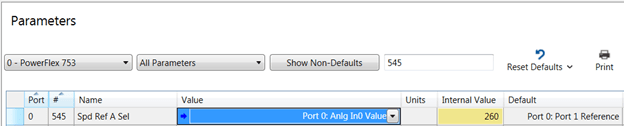
The internal value or also called the parameter number is 260. Remember 260 from the paragraph above where you could see the incoming analog value? This value will determine the speed of the drive, it serves many purposes.
Let’s change the speed reference to port 4 and use the analog signal Ai0 since the module has two analog channels. First, let’s set the jumpers for current to accept the 4-20mA signal it will receive.
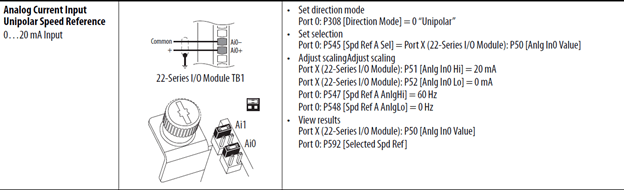
Navigate to port 4 using the folders button on the HMI and use blue left and right arrows to get to the “ports” tab scroll up or down with the blue keys and hit enter (soft key on top of buttons). Port 4 icon should appear, and now port 4 is the host, and all the parameters for port 4 are accessible. Shown above is change parameter 52 in port 4 to “4” mA.
Navigate back to port 0 and access parameter 545 drill in to point the speed reference and choose port 4 Anlg Ai0 value parameter 50 in port 4. You can check the incoming signal in port 4 parameter 50. Start the drive and test the speed reference.
Multiple speed references can be selected also by using the speed select bits that are assigned this is accomplished through speed select inputs in Port 0. We will briefly discuss to explain how these values work.
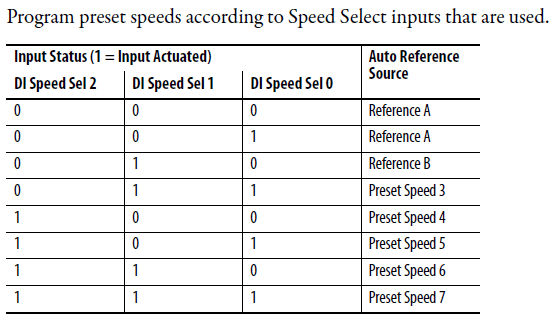
Speed select inputs may be programmed to change the speed reference in the drive. Speed reference A will be invoked with all “0”s or a “1” in DI Speed Sel 0.
Speed Reference B can be programmed to any other speed reference. To invoke this reference a high signal must be sent to Speed Sel 1.
The other combination of high signals will result in the Preset Speeds shown above.
The speed sel inputs are located in port 0. They are unassigned, so you will assign these parameters as speed sel 0,1,2. You do not have to use all speed sel parameters. These parameter numbers are listed below.
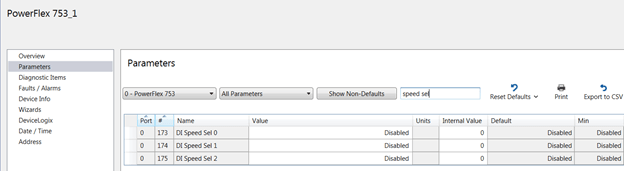
Using a selector switch or PLC, the speed can be changed on the fly. The drive will follow the slope of acceleration and deceleration times and go from the present speed to the new commanded speed. Please observe the filter in Connected Components Workbench and how the parameters were filtered to only show the speed select shown above.
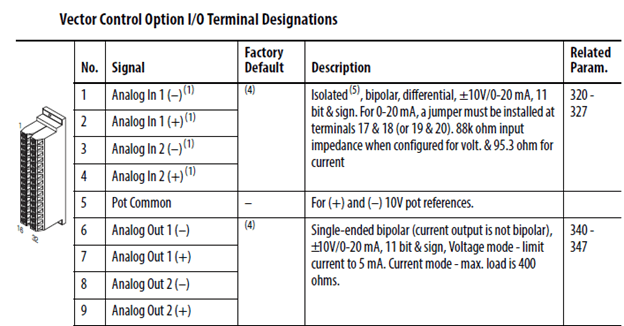
Analog outputs are shown above for the PowerFlex 700 drive terminals. If you have these terminals wired on the old PowerFlex 700 drive, you need to transfer these to the PowerFlex 750 drive. Unlike the analog inputs, the configuration is done without any hardware jumpers; it is all programmed internally in the drive. All defaults from the factory on analog channels including analog outputs are 0-10 V DC factory default. These will be changed to 4-20 mA like the analog inputs were. Why are 4-20 mA signals so predominant? A 0-10 V DC signal should not be extended more than 30 feet and is susceptible to noise issues. A 4-20 mA signal can run hundreds of feet and is very noise immune. Shielded cable shielded on the drive should be on the drive end only, and they should already be in place just like the analog input channel on the PowerFlex 700 drive. If this is not the case, please consider swapping out the cable to a shielded style and ground the drive end to the ground bus.
Parameters of interest on the PowerFlex 700 VC style drive, using the vector control cassette, is the majority of drives sold had this main control board and is used in this example. Please examine the parameters of interest to know what these values are to modernize to the new PowerFlex 750 drive.
In this example, the analog high 20 mA and analog low 4 mA are set to the correct setting for an extended distance. Parameters of interest are different than the analog inputs, it will be parameters in the drive you wish to share with other devices, such as what speed you are running at or how many amps you are drawing due to the load. The “analog out sel” will determine what your output signal will be. The vector cassette has two channels (the standard card only has one channel).

This is a view from Connected Components Workbench, if you are using the HMI navigate to the proper parameter. Notice the port number for the drive parameters are all in port 0 unlike the PowerFlex 750 drive, which has a backplane and multiple ports to insert all kinds of different modules.
As mentioned above, the PowerFlex 755 drive is not the primary focus of this blog. It is important to remember that all these practices can be used in the PowerFlex 755 drive with expansion modules. The PowerFlex 755 drive main control board only has one digital input and one relay output and is considered a system drive with primary strength using ethernet control via a ControlLogix processor with direct access to the drive parameters.
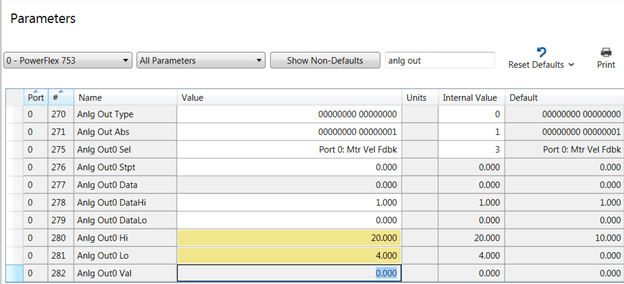
Let’s look at port 0 first, since it has an analog output available. If you are using one output, this is like the PowerFlex 700 drive. This example shows the changes involved to make the channel 4-20 mA. For the first channel, let’s look at scaling. The default is 0-10 V DC shown below. Please change to 20 mA high upper range (parameter 280) and 4 mA for low (parameter 281). This is shown in yellow on the screen capture. Parameter 270 should now show a “1” on the right-hand bit to verify the channel has changed to 4-20 mA. If it does not edit the bit on the right, make it a “1” using the HMI or Connected Components Workbench software.
Notice the nomenclature is slightly different. “Output frequency” in the PowerFlex 700 drive now has been renamed “mtr vel fdbk” this is the new equivalent in the PowerFlex 750 series drives. Notice the port 0 is the same as the PowerFlex 700 drive because we are in the main control board for both drives. This is the easiest transition to the new analog output channel.
The question to ask here is do you have more than one output? In this case, then you need an additional expansion module.
HINT: The analog channel value can be observed to check the magnitude of that channel (parameter 282), it is strongly advised the drive is to make sure it is operating properly and the scaling is correct.
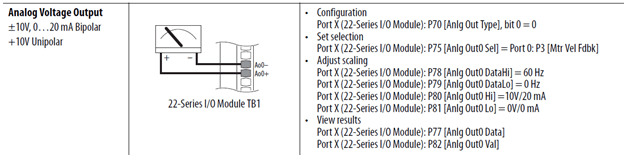
Now that you have programmed the 4-20 mA, connect your device, shown is a 22 series expansion module that has two ports Ao0, and Ao1. Assign the values shown below if you are using the expansion ports.
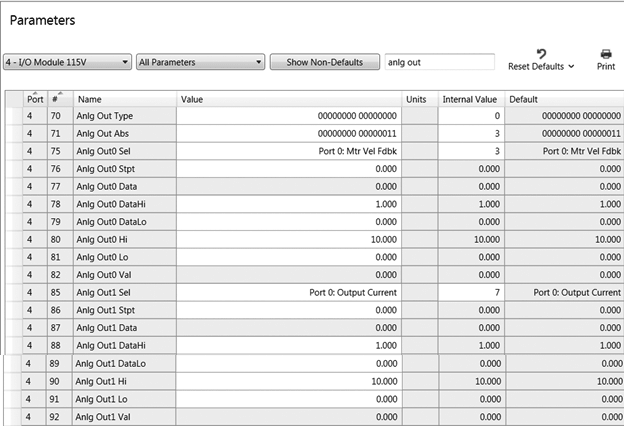
We have installed an expansion module in port 4. Now there are two analog out channels. The scaling is the same as above. You will assign a parameter from port 0 to the analog output sel parameters 75 or 85 in the host module in port 4 and tie them to the functions in port 0. Check the channel values in parameters 82 and 92 in the drive while the drive is running to verify limits and spans are correct. Parameter 70 if in “current” mode will show a “1” on the far right if it is set for 0-20 mA or 4-20 mA.
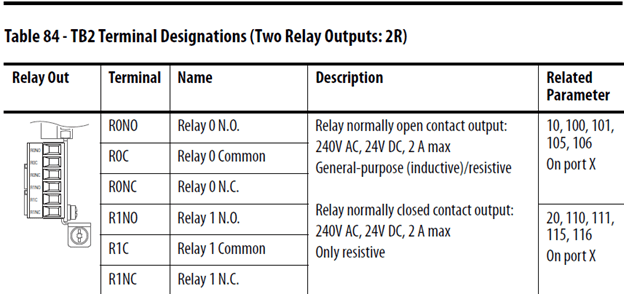
Relay outputs can be assigned to such events as “running” or “faulted,” not running and the drive is in peril. A variety of options can be used depending on the application the drive is operating in for an environment. Let’s examine the terminals on the PowerFlex 700 drive.
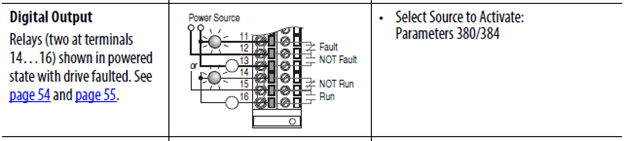
If there are wires on these terminals, you have a digital signal that is being used for status by another device, i.e. PLC or DCS. These statuses usually are interlocked to the I/O on a PLC and make it difficult to start unless programmed correctly. The illustration above shows the state of faulted.
Let’s compare to an expansion card example to stay consistent with the section of the blog at this point. These relays reside in Port 4. Let’s compare wiring in the example below:
Program the drive relay function on parameter 10 for Ro0 and 20 for Ro1.
IMPORTANT: Drive “running” in PowerFlex 700 now is drive “active” in PowerFlex 750 series.
If you gathered information on the PowerFlex 700 before the drive failed, you can see how much easier the transition is to the PowerFlex 750 series drive, and you can concentrate on just the programming of the PowerFlex 750 drive and not have to assume some parameters, because they are unknown at the wire location on the terminal block.
Now we will take the PowerFlex 700 drive example for the relay defaults and change the parameters in the PowerFlex 750 drive relays in port 4. The relay physically resides in port 4 so this must be the host and point back at a function in the drive port 0, such as “faulted” and “active” status so the relay changes state on the correct event.
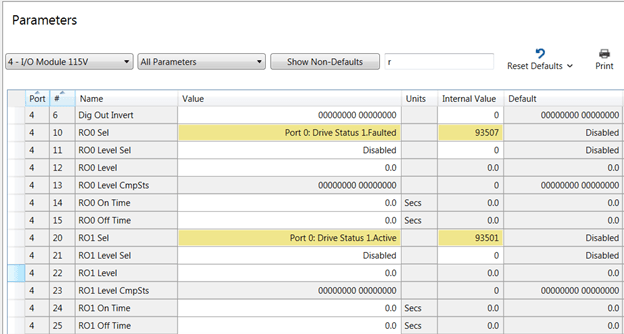
The upper left side of the capture above shows Ro0 is set to faulted and is selected, this relay should be wired normally closed (NC) if the relay needs to send a signal when the drive faults to other devices. The relay is pointed back to port 0 parameter 935 which has a string of bits with different functions we can choose the “faulted” status bit. Ro1 is selected to energize when the output is running or “active.”
The relay can also have delays for turning on or turning off Ro0 parameters (14, 15) or Ro1 (24, 25). Relays can also be used for levels to turn on and off also but will not be discussed in this literature. The relays can be also programmed for resistive and inductive loads on the relay output. Coils on the electromechanical relay on the drive would be considered inductive load for example. These relays are not intended to run small motors. Amp ratings are shown above.
Let’s take a few minutes and discuss the ethernet ports on both drives and some of the differences and advancements. The PowerFlex 700 drive is primarily a single port drive for most hard-wired applications. The digital and analog wires are landed on a predetermined location, and the drive is then programmed to perform when a signal is sent to that location. Digital inputs and relay outputs are “on off” signals, and analog signals are a continuous signal with magnitude; the larger the value, the more or less the drive will react (speed for example). It is always important to remember these concepts will be used over ethernet as well. For years, networking has been used to simplify installation and drastically cut the cost, as well. The serial communication market such as “blue hose” was prior to ethernet, but to this day the structure has not changed much, except now we can provide more information through ethernet with higher bandwidth on the networks.
Tag driven data in the PowerFlex 700 and PowerFlex 750 series drives, vs. the 1336Plus drives with bit and word structure allowed bits and word (16 bits) strings to be seen and understood from a data point of view. The advent of the ControlLogix processor allowed tags to be directly always accessed between the drive and the ControLogix controller.
PowerFlex 70 drive or PowerFlex 700 drive allowed an access to port 5. Port 5 used a 20-COMM-E (DPI port) communication adapter that has four mounting screws with a ribbon cable usually on the door of the drive. The status lights can be viewed through the cover of the drive.
It is important to know the IP address, subnet mask, and gateway information from the old PowerFlex 700 drive. If you have this information, skip this section.
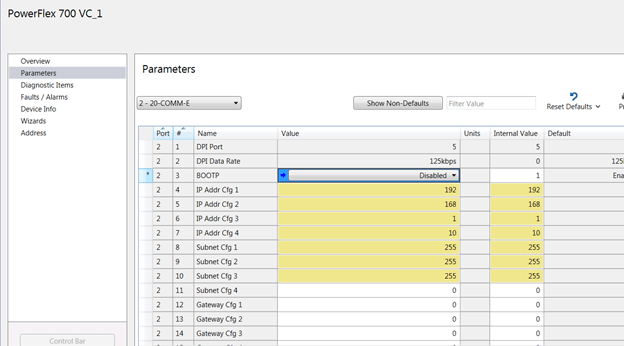
This is a Connected Components Workbench view on the PowerFlex 700 drive port 5 parameter list; observe these values. You may not have a gateway on your communications configuration. Gateways leave the building for remote access. Document the IP address and keep in mind parameter 3 is disabled for BOOTP.
You will place the addressing in the 20-750-ENETR in the PowerFlex 750 drive with this information. Port 6 has been left available because of cable access and addresses will be entered in port 6 of the PowerFlex 750 drive.
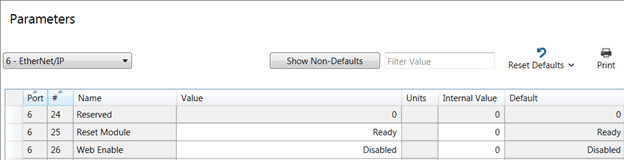
Here is a screenshot in port 6 of the PowerFlex 753 drive and the networking information that you will need to put in the different parameters.
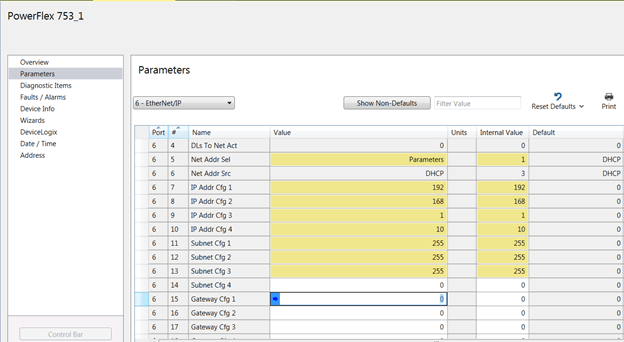
IMPORTANT: Parameter 5 in port 6 should be set to the “parameters” value to load the IP address into the drive from the HMI.
The default is dynamic host configuration protocol (DHCP), which means you would have to get an IP address from a router on the network. BOOTP would be used in case you wanted to assign the port address from the BOOTP server software included with your Logix software install. If you utilize the BOOTP server, you must disable the BOOTP prior to leaving the software window. If the adapter remains in BOOTP mode the next power cycle, it will wipe out the assigned IP address and drive will not communicate. Consider using BOOTP when installing MCCs, connect one device at a time on the network, assign an IP address to the device, then plug in the next device, etc., etc. This is much more efficient than the HMI assignment. DHCP assignment by far is the best approach, especially on large networks. The IP addresses constantly change though vs. fixed IP addresses with the other two methods mentioned above.
Once the drive has the IP address, cycle power to the adapter to finish the IP commissioning. Make sure you see the address in RSLinx® software or from the command prompt ping the IP address to make sure it is communicating. If you do not see the IP address, cycle power to the drive.
The PowerFlex 753 drive also has a web browser, and you can try to communicate that way also. You will need to enable the webpage shown below (parameter 26 port 6).
Please keep in mind, the above example is class C subnet masking. The network ID is the last octet and the network can hold up to 255 unique networking nodes. Other classes can be used, but it is strongly advised to consider network traffic when adding too many nodes on one subnet.
Let’s review the strategy one more time:
This article should give you a great head start on the procedure, and help you know what to look for inside and outside the drive prior to installing the drive. Please contact us with any additional questions you may have regarding programming the modernization from the PowerFlex 700 drive to the PowerFlex 750 drive.
The Rockwell Automation website contains literature of interest on the modernization of architect drives. The literature is updated constantly, and the literature library has a search for the following literature that begins with the following titles:
We hope you have found this blog useful in your modernization adventure. Please feel free to submit any questions to our staff regarding the material that may not have been part of the scope. We are here is assist you in any way possible.